RTK یک تکنیک پیشرفته برای تعیین موقعیت دقیق ماهوارهای به صورت آنی است که از یک یا چند ایستگاه مرجع زمینی (Base Station) بهره میبرد و به منظور تعیین موقعیت نسبی گیرنده متحرک (Rover) مورد استفاده قرار میگیرد. این روش برای افزایش دقت در مشاهدات سیستمهای تعیین موقعیت و ناوبری ماهوارهای GNSS، که شامل ماهوارههای GPS، GLONASS، GALILEO و BEIDOU میشود، به کار گرفته میشود. با استفاده از روش RTK، میتوان به دقتی در حد سانتیمتر دست یافت. GNSS RTK شامل سه روش رایج یعنی RTK کلاسیک، RTK نقطهای و RTK شبکهای است.
در روش RTK شبکهای، از مجموعهای از ایستگاههای دائمی مرجع تحت عنوان CORS استفاده میشود. این گیرندهها در نقاطی با مختصات معلوم (چه به صورت مختصات ژئودتیک WGS84 یا مختصات UTM) به صورت ۲۴ ساعته اطلاعات جمعآوری کرده و این دادهها را به یک مرکز پردازش ارسال میکنند. سپس، با توجه به محل قرارگیری Rover، تصحیحات موقعیتی مانند مدل یونوسفر، مدل تروپسفر و خطای مداری توسط مرکز پردازش دادهها و با استفاده از الگوریتمهایی مانند VRS یا MAC محاسبه و برای Rover ارسال میشود. برخی از این تصحیحات، از جمله مدلهای یونوسفر و تروپسفر، قابلیت ذخیرهسازی در مرکز پردازش را دارند و میتوانند برای پسپردازش مورد استفاده قرار گیرند.
این الگوریتمها با بهرهگیری از روشهای ریاضی مدرن در نقشهبرداری، تصحیحات موقعیتی دقیقی را بین ایستگاههای مرجع تولید میکنند و از دقت و ضریب اطمینان بالایی برخوردارند. در ادامه این مقاله از هیرو نگار به معرفی الگوریتمهای VRS و MAC خواهیم پرداخت.

آشنایی با ایستگاه مرجع مجازی (VRS)
VRS که مخفف عبارت Virtual Reference Station است، یکی از پرکاربردترین الگوریتمهای RTK (Real-Time Kinematic) برای تعیین موقعیت دقیق با استفاده از سیستمهای ناوبری ماهوارهای GNSS (Global Navigation Satellite System) مانند GPS، GLONASS، Galileo و BeiDou محسوب میشود. هدف اصلی VRS کاهش فاصله بین ایستگاه مرجع و گیرنده Rover است تا دقت موقعیتیابی افزایش یابد و خطاهای ناشی از عوامل مختلف برطرف شوند. از جمله این خطاها میتوان به موارد زیر اشاره کرد:
خطای مداری ماهوارهها: ماهوارههای GNSS در مدارهایی قرار دارند که به طور مداوم در حال تغییر و حرکت هستند. این مدارها ممکن است به دلایلی مانند جاذبه زمین و فشار تابش خورشیدی دچار انحراف شوند. چنین انحرافاتی میتواند بر دقت اندازهگیریهای GNSS تأثیر بگذارد.
تأخیرات اتمسفری: سیگنالهای GNSS هنگام عبور از لایههای اتمسفر زمین دچار شکست و تأخیر میشوند. میزان این تأخیر به زاویه و ارتفاع ماهواره و همچنین شرایط جوی مانند رطوبت و دمای هوا بستگی دارد. این تأخیرات میتوانند دقت موقعیتیابی را کاهش دهند.
نویز: نویزهای مختلفی از جمله نویزهای الکتریکی و محیطی میتوانند بر دقت اندازهگیریهای GNSS و توپوگرافی تأثیر منفی بگذارند و منجر به خطاهای قابل توجهی در تعیین موقعیت شوند.
VRS با ایجاد یک ایستگاه مرجع مجازی در نزدیکی گیرنده Rover، به کاهش این خطاها کمک میکند و در نتیجه، موقعیتیابی دقیقتری را امکانپذیر میسازد.
روش ایستگاه مرجع مجازی (VRS)
روش ایستگاه مرجع مجازی یا VRS یکی از پرکاربردترین الگوریتمهای RTK است که به منظور افزایش دقت تعیین موقعیت در سیستمهای ناوبری ماهوارهای GNSS استفاده میشود. در این روش، یک ایستگاه مرجع مجازی توسط مرکز پردازش و در نزدیکی محل قرارگیری گیرنده Rover ایجاد میشود. هدف اصلی این کار، کاهش فاصله بین ایستگاه مرجع و گیرنده Rover است تا تأثیر خطاهای مداری ماهوارهها و تأخیرات اتمسفری به حداقل رسیده و دقت موقعیتیابی گیرنده افزایش یابد.
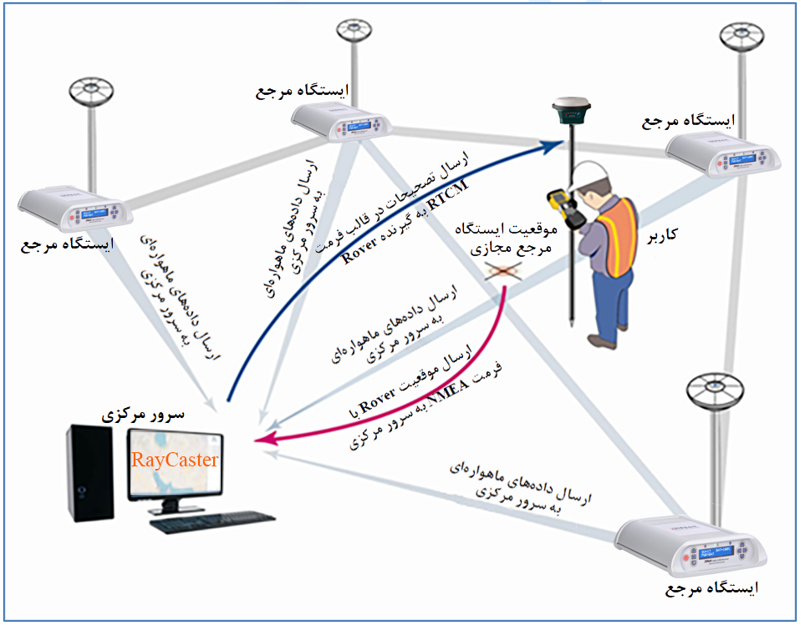
روند کار به این شکل است که مرکز پردازش، مشاهدات شبه فاصله و فاز موج حامل حداقل سه ایستگاه دائمی مرجع CORS که در نزدیکی گیرنده Rover قرار دارند را به صورت پیوسته جمعآوری و پردازش میکند. برای تعیین موقعیت ایستگاه مرجع مجازی، یک ارتباط دو طرفه بین گیرنده Rover و مرکز پردازش برقرار میشود تا محاسبات لازم انجام گیرد. در این فرآیند، کاربر در محل گیرنده Rover مختصات تقریبی خود را با استفاده از فرمت NMEA به مرکز پردازش ارسال میکند. این مختصات تقریبی با دریافت اولین تصحیحات بهبود یافته و مجدداً به مرکز پردازش ارسال میشود.
به عبارت دیگر، مرکز پردازش در این موقعیت تقریبی، یک ایستگاه مرجع مجازی (VRS) ایجاد کرده و با استفاده از مشاهدات ایستگاههای دائمی مرجع، از طریق روشهای درونیابی خطی، غیرخطی یا برازش صفحهای، مجموعهای از مشاهدات و تصحیحات GNSS را برای این ایستگاه مرجع مجازی محاسبه میکند.
پس از تعیین موقعیت ایستگاه مرجع مجازی، تصحیحات با فرمت RTCM از طریق پروتکل NTRIP به گیرنده Rover ارسال میشود. با دریافت این تصحیحات، گیرنده Rover قادر است موقعیت خود را با دقتی در حد سانتیمتر تعیین کند.
ویژگی های الگوریتم VRS
- استفاده از فرمت RTCM برای ارسال تصحیحات: در این الگوریتم، تصحیحات موقعیتی با استفاده از فرمت RTCM 3.x ارسال میشود. همچنین، امکان استفاده از فرمت RTCM 2.x (شامل پیامهای نوع 18 و 19 یا 20 و 21) نیز وجود دارد.
- پشتیبانی از گیرندههای تک فرکانسه و چند فرکانسه: الگوریتم VRS به گونهای طراحی شده است که هم گیرندههای تک فرکانسه و هم چند فرکانسه (مولتیفرکانس) میتوانند از RTK تحت شبکه بهرهمند شوند. این گیرندهها میتوانند موقعیت تقریبی خود را از طریق فرمت NMEA به مرکز پردازش ارسال کنند.
- ضرورت ارتباط دو طرفه بین گیرنده Rover و مرکز پردازش: همانطور که اشاره شد، برای عملکرد صحیح VRS، باید یک ارتباط دو طرفه بین گیرنده Rover و مرکز پردازش فراهم شود. این ارتباط به گیرنده Rover اجازه میدهد مختصات تقریبی خود را با استفاده از فرمت NMEA ارسال کند. این الزام به برقراری ارتباط دو طرفه، باعث محدودیت در تعداد کاربران همزمان برای دریافت تصحیحات از مرکز پردازش میشود.
- نیاز به دسترسی به اینترنت یا لینک GSM: برای استفاده از الگوریتم VRS، دسترسی به اینترنت یا یک لینک GSM ضروری است. چرا که در مرحله ارسال اطلاعات از مرکز پردازش به گیرنده Rover و یا بالعکس، امکان استفاده از لینک رادیویی وجود ندارد.
- تغییر ایستگاه مرجع مجازی در صورت افزایش فاصله: اگر فاصله بین گیرنده Rover و ایستگاه مرجع مجازی ایجاد شده از یک حد مشخص فراتر رود، یک ایستگاه مجازی جدید در نزدیکی محل فعلی گیرنده Rover مشخص و مورد استفاده قرار میگیرد. در این حالت، برای رفع ابهام فاز، گیرنده Rover نیاز به راهاندازی مجدد دارد تا بتواند تصحیحات جدید را دریافت و اعمال کند.
- استفاده از تعداد محدودی ایستگاههای مرجع: برای محاسبه تصحیحات هر گیرنده Rover، الگوریتم VRS معمولاً از سه ایستگاه مرجع استفاده میکند. این محدودیت ممکن است توانایی سیستم برای سازگاری با شرایط متغیر اتمسفر را کاهش دهد. همچنین، اگر به هر دلیلی اطلاعات یکی از این سه ایستگاه مرجع به مرکز پردازش ارسال نشود، نیاز به جایگزینی ایستگاه مرجع و انجام محاسبات مجدد است که میتواند باعث تأخیر در ارسال تصحیحات شود.

مزایای استفاده از الگوریتم VRS
- دقت بالا: الگوریتم VRS میتواند دقت موقعیتیابی را به سطح سانتیمتر و حتی میلیمتر ارتقا دهد، که برای کاربردهای حساس مانند فتوگرامتری بسیار مهم است.
- پوشش گسترده: VRS در مناطقی که دسترسی به ایستگاههای مرجع فیزیکی دشوار یا غیرممکن است، به خوبی عمل میکند و این امکان را فراهم میآورد که دقت موقعیتیابی در نقاط دورافتاده نیز حفظ شود.
- کاهش هزینهها: استفاده از VRS به طور قابل توجهی هزینههای مرتبط با استقرار و نگهداری ایستگاههای مرجع فیزیکی را کاهش میدهد، چرا که نیاز به ساخت و نگهداری تعداد زیادی ایستگاه مرجع از بین میرود.
- قابلیت اطمینان بالا: الگوریتم VRS از یک شبکه گسترده و متصل از ایستگاههای مرجع دائمی بهره میبرد که پایداری و دقت بالایی را در تصحیحات موقعیتی فراهم میکند، و باعث افزایش اعتمادپذیری سیستم میشود.
مفهوم الگوریتم (MAC)
روش مفهوم اصلی-کمکی (MAC) پس از روش VRS ایجاد شده و شامل یک ایستگاه اصلی (Base Station) و چندین ایستگاه مرجع CORS است. در این روش، به منظور کاهش حجم اطلاعاتی که در شبکه ارسال میشود، تمام تصحیحات و اطلاعات مربوط به موقعیت تنها توسط ایستگاه اصلی ارسال میگردد. سایر ایستگاههای CORS به عنوان ایستگاههای کمکی (Auxiliary Stations) مورد استفاده قرار میگیرند و اختلاف تصحیحات و اختلاف موقعیت هر یک از آنها نسبت به ایستگاه اصلی محاسبه میشود.
نکته مهم در روش MAC این است که ایستگاه اصلی لزوماً نزدیکترین ایستگاه به گیرنده Rover نیست. در صورتی که اطلاعات ایستگاه اصلی به هر دلیلی فراهم نباشد، یکی از ایستگاههای کمکی به عنوان ایستگاه اصلی در نظر گرفته میشود.
در این روش، شبکه بر اساس خوشه (Cluster) و سلول (Cell) طراحی میشود. هر شبکه شامل چند خوشه است که ممکن است با هم همپوشانی داشته باشند. هر خوشه در واقع زیرمجموعهای از شبکه ایستگاههای دائمی مرجع است و به گونهای انتخاب میشود که با استفاده از روش تفاضلی دوگانه، ابهام فاز موجود حذف گردد. هر سلول شامل حداقل سه ایستگاه در یک خوشه و یک ایستگاه اصلی است.
به عبارت دیگر، در روش MAC از چندین ایستگاه مرجع استفاده میشود تا دقت تصحیحات افزایش یابد و در عین حال حجم دادههای ارسالی در شبکه کاهش پیدا کند.
مزایای استفاده از الگوریتم MAC
- کاهش حجم اطلاعات: در مقایسه با روش VRS، الگوریتم MAC حجم اطلاعات ارسالی در شبکه را به طور قابل توجهی کاهش میدهد. این مزیت به خصوص در شبکههای گسترده با تعداد زیادی گیرنده Rover بسیار مهم است، زیرا کاهش حجم دادهها منجر به افزایش کارایی کلی شبکه میشود.
- کارایی بالا: با کاهش حجم اطلاعات ارسالی، MAC به طور چشمگیری کارایی سیستم RTK را بهبود میبخشد. این بهبود کارایی منجر به کاهش زمان لازم برای تعیین موقعیت دقیق میشود و همچنین پایداری سیستم را افزایش میدهد، که در عملیات حساس و زمانبندی شده بسیار حائز اهمیت است.
- قابلیت اطمینان بالا: یکی از مزایای کلیدی MAC، انعطافپذیری در صورت عدم دسترسی به ایستگاه اصلی است. در صورتی که ایستگاه اصلی به هر دلیلی نتواند به وظایف خود عمل کند، یکی از ایستگاههای کمکی به عنوان ایستگاه اصلی جایگزین میشود. این ویژگی از بروز وقفه در عملیات جلوگیری کرده و اطمینان از پایداری و تداوم عملکرد سیستم را فراهم میکند.
کاربردهای الگوریتم MAC
- نقشهبرداری: الگوریتم MAC به طور گسترده در نقشهبرداریهای زمینی، هوایی و دریایی استفاده میشود. این کاربرد شامل تهیه نقشههای دقیق توپوگرافی، هیدروگرافی و فتوگرامتری با دقت بالا است که در بسیاری از پروژههای مهندسی و مطالعات جغرافیایی اهمیت دارد.
- کشاورزی: در صنعت کشاورزی، الگوریتم MAC برای هدایت دقیق ماشینآلات کشاورزی، مانند تراکتورها و سیستمهای آبیاری به کار میرود. این دقت بالا در هدایت، موجب افزایش بهرهوری، کاهش هزینهها و بهبود مدیریت منابع میشود.
- ساخت و ساز: در پروژههای ساختمانی، MAC در کنترل کیفیت و نظارت بر مراحل مختلف پروژهها کاربرد دارد. این شامل اندازهگیریهای دقیق برای تعیین موقعیت سازهها، کنترل نشستها و تغییرات در ساختارهای موجود است که به تضمین دقت و ایمنی در پروژهها کمک میکند.
نتیجهگیری
الگوریتمهای VRS و MAC دو روش قدرتمند برای افزایش دقت موقعیتیابی و بهبود عملکرد سیستمهای ناوبری ماهوارهای هستند. انتخاب بین این دو روش به عوامل مختلفی مانند حجم شبکه، دقت مورد نیاز، هزینه، و مهارت کاربر بستگی دارد.
روش VRS به دلیل سادگی در استفاده و کارایی بالا، انتخاب مناسبی برای شبکههای کوچک و کاربران کمتجربه است. این روش با ایجاد یک ایستگاه مرجع مجازی در نزدیکی گیرنده، دقت بالایی را با حداقل پیچیدگی فراهم میکند.
در مقابل، روش MAC با کاهش حجم اطلاعات ارسالی و افزایش کارایی سیستم، برای شبکههای گسترده با تعداد زیادی گیرنده Rover گزینه مناسبتری محسوب میشود. این روش به دلیل استفاده از ایستگاههای کمکی و توانایی در مدیریت شبکههای بزرگ، به کاربرانی که با چالشهای بزرگتری روبرو هستند، توصیه میشود.
در نهایت، انتخاب روش مناسب به شرایط خاص هر پروژه بستگی دارد. امیدواریم این مقاله به شما در درک بهتر الگوریتمهای VRS و MAC و انتخاب روش مناسب برای نیازهای خود کمک کرده باشد.